


Máy quét 3D
Giới thiệu chung
VXscan-R
Nền tảng lập trình và thu thập dữ liệu 3D quét trực quan và tích hợp nhất
VXscan-R™ là phần mềm lập trình ngoại tuyến giúp ngay cả những người không chuyên về quét 3D hoặc robot có thể thực hiện các phép đo kích thước tối ưu trong thời gian ngắn nhất. Với trí tuệ quét và các tính năng chuyên dụng có sẵn trong VXscan-R, việc lập trình đường đi của robot và tối ưu hóa tầm nhìn cùng tốc độ quét trở nên đơn giản, giúp các giải pháp quản lý chất lượng dễ dàng hơn. VXscan-R là chìa khóa để quản lý tế bào robot hiệu quả hơn, giải quyết các vấn đề lập trình và bảo mật, đồng thời giúp những người không chuyên tự tin làm việc với hệ thống robot. Nhờ VXscan-R, giờ đây bất kỳ ai cũng có thể sử dụng quản lý chất lượng tự động để đưa ra quyết định thông minh hơn và đạt được chất lượng sản phẩm vượt trội. Các nguồn lực trước đây dành cho công việc đo lường có thể được chuyển hướng sang các nhiệm vụ có giá trị hơn, nâng cao hiệu quả toàn bộ tổ chức.
Tư vấn với chuyên gia
Video sản phẩm
Tính năng

Thư viện hình ảnh
Quy trình làm việc
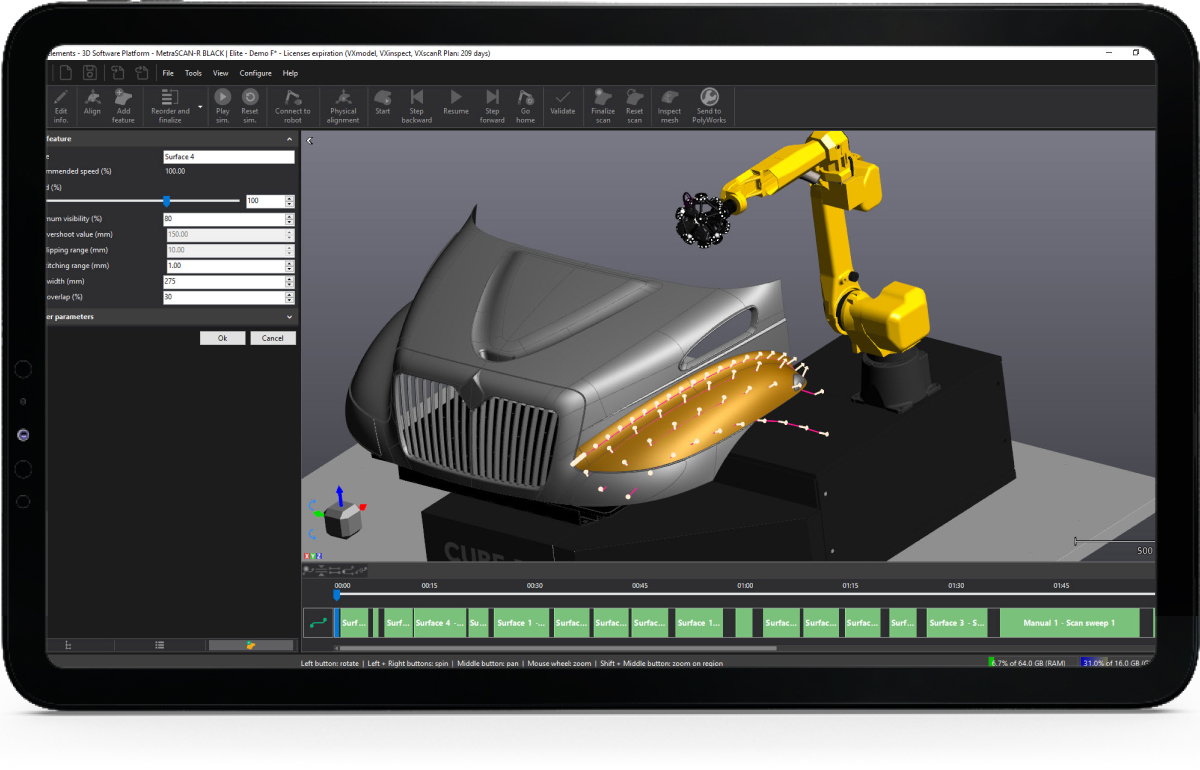
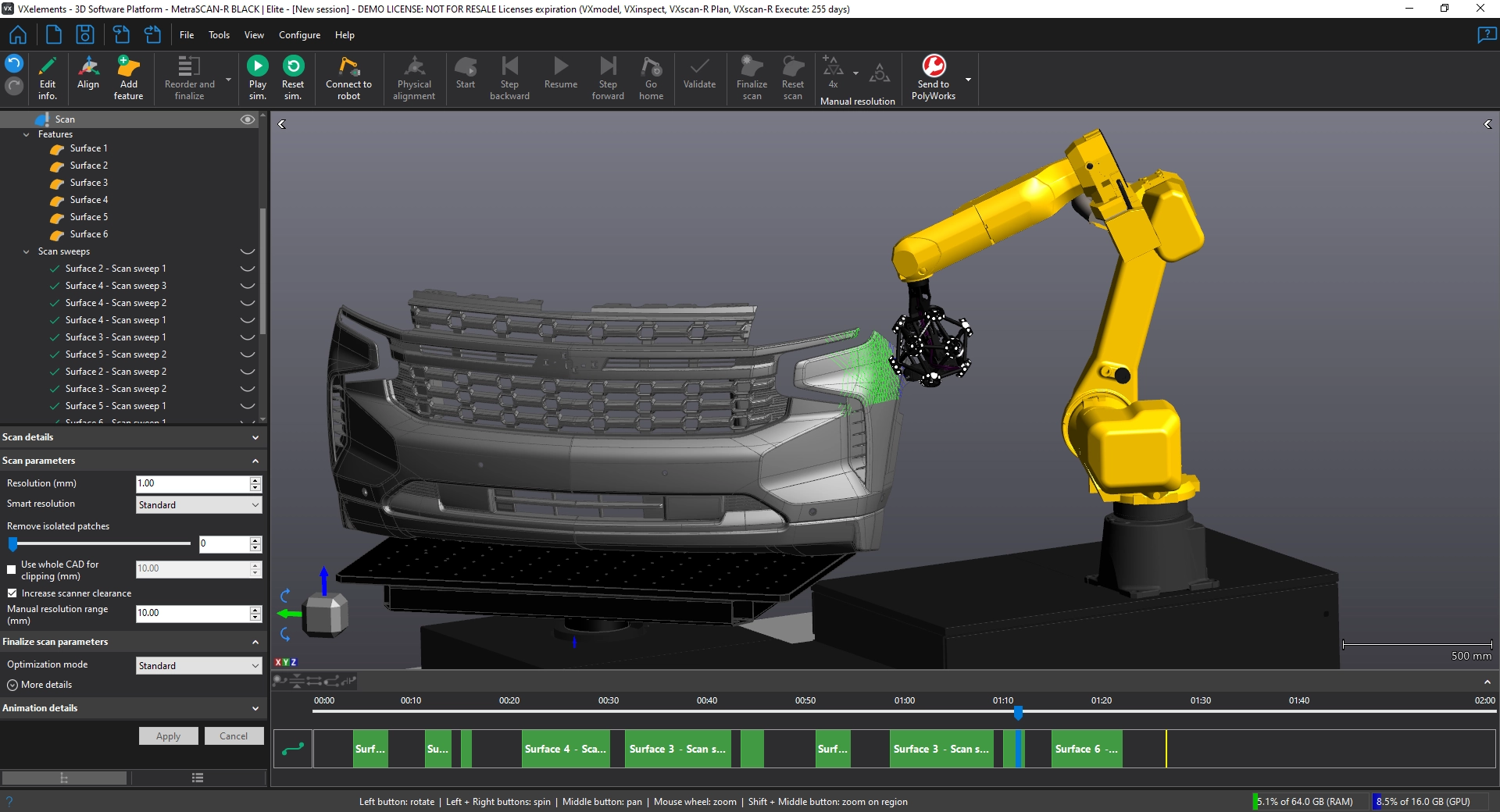
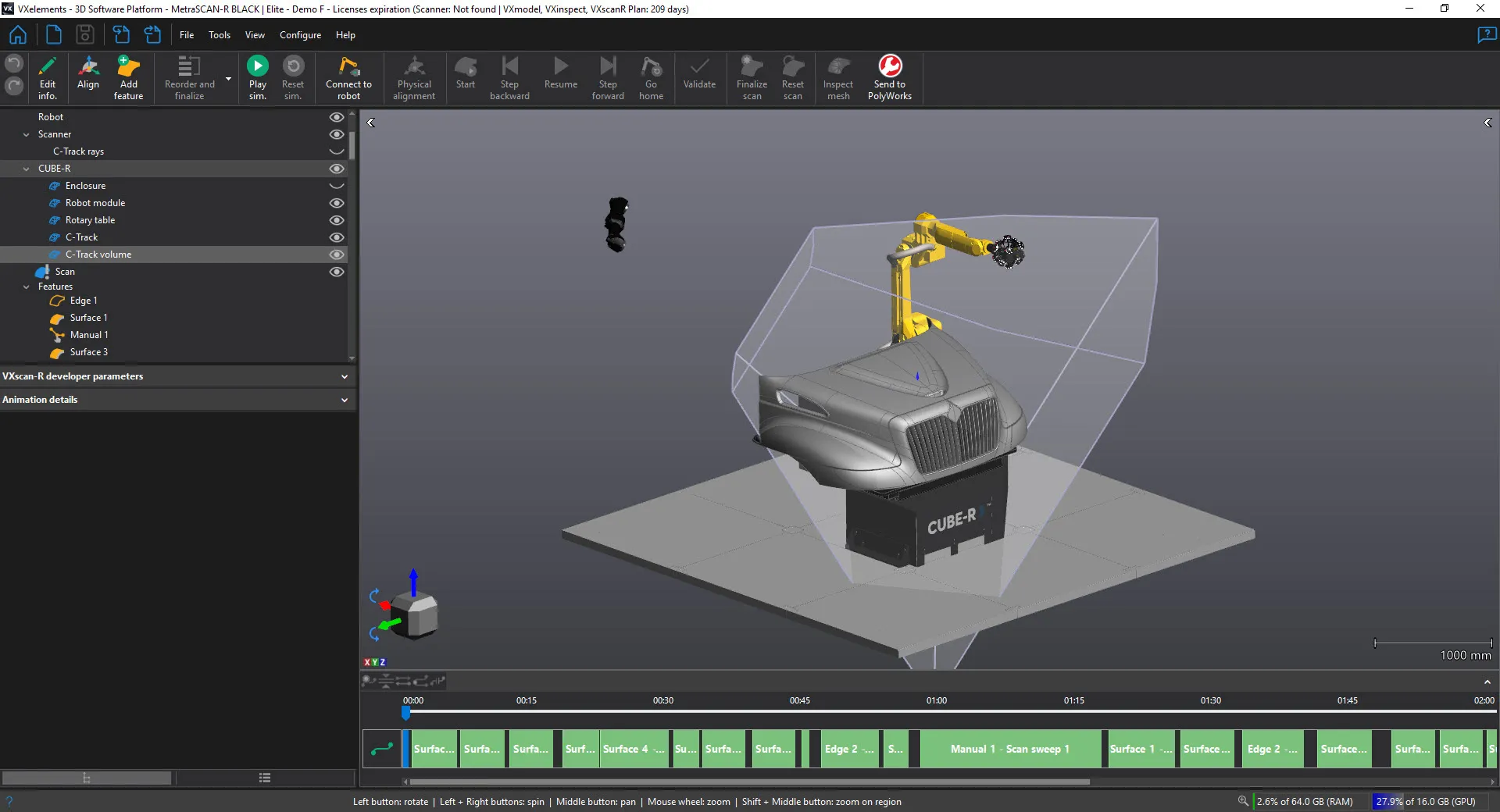
Lập trình robot
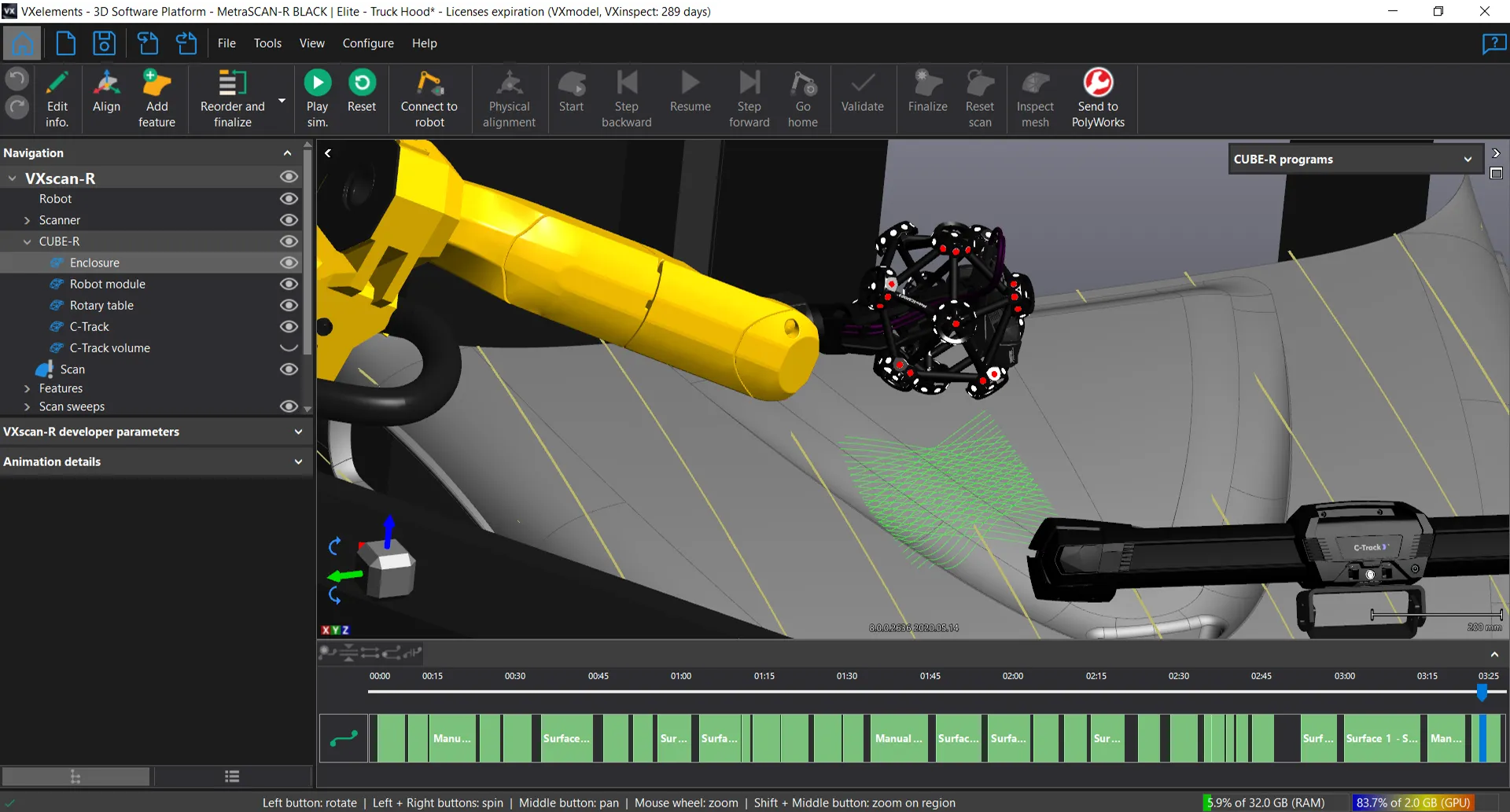
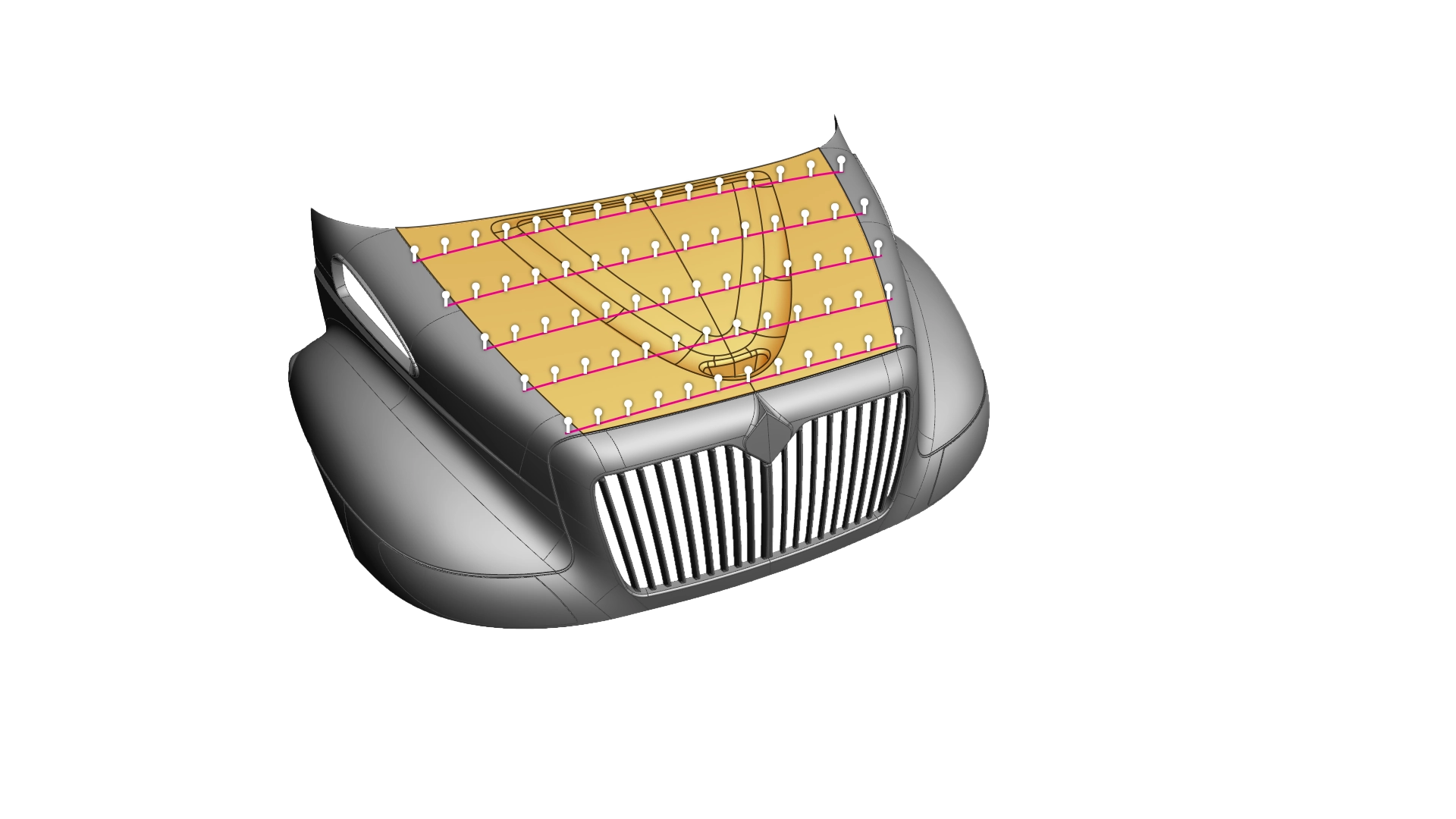
VXscan-R sử dụng mô hình CAD để tạo vị trí cảm biến tối ưu cho việc kiểm tra bề mặt. Người dùng có thể chọn bề mặt, cạnh hoặc điểm từ mô hình CAD để tạo đường đi tự động cho robot hoặc sử dụng tính năng jog để lập trình thủ công. Trong khi lập trình, VXscan-R sẽ phát hiện các điểm đặc biệt và tránh va chạm.
- Căn chỉnh CAD
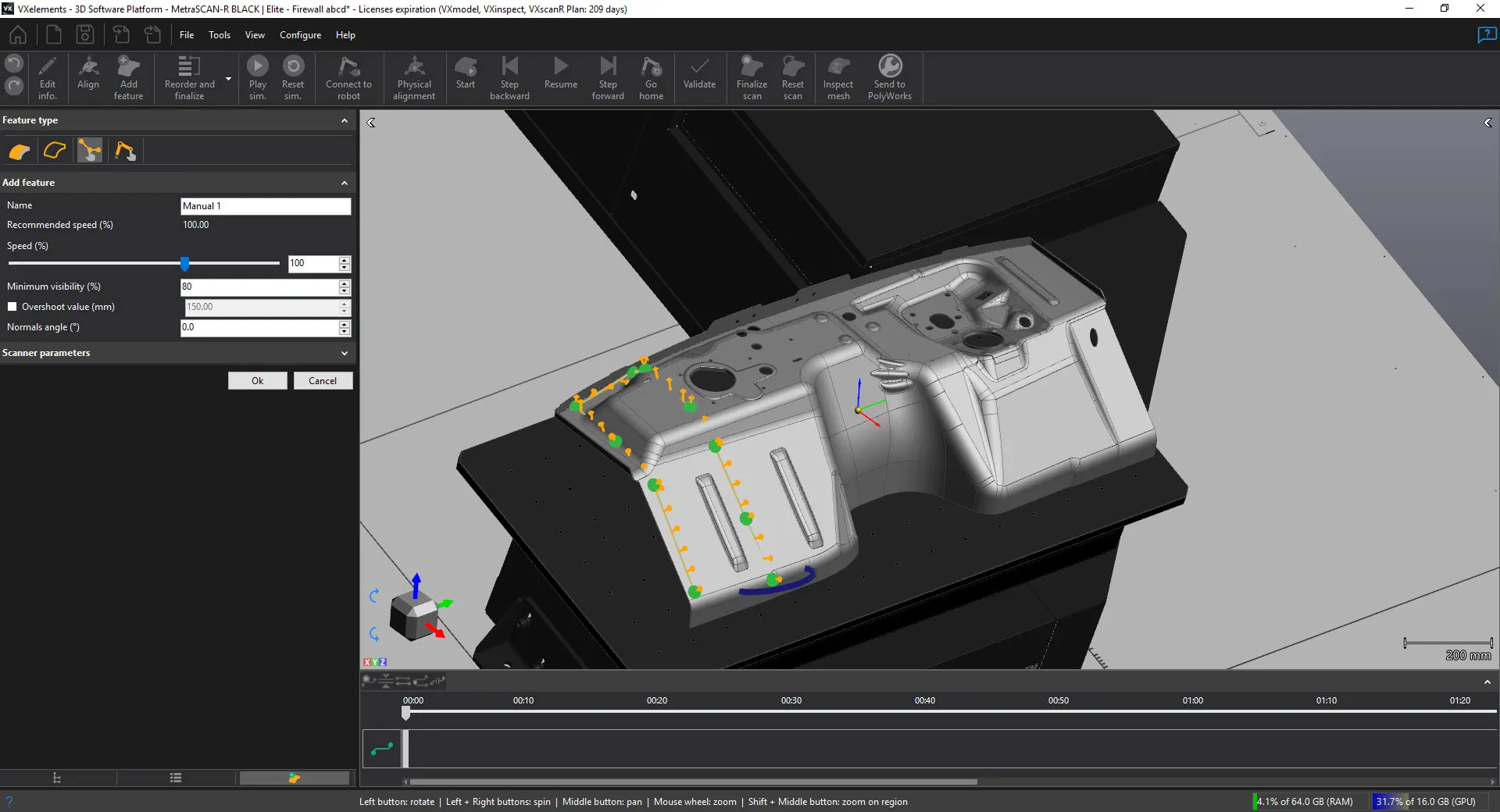
- Lập trình tham số thông qua chọn bề mặt, cạnh, điểm
- Tính năng jog
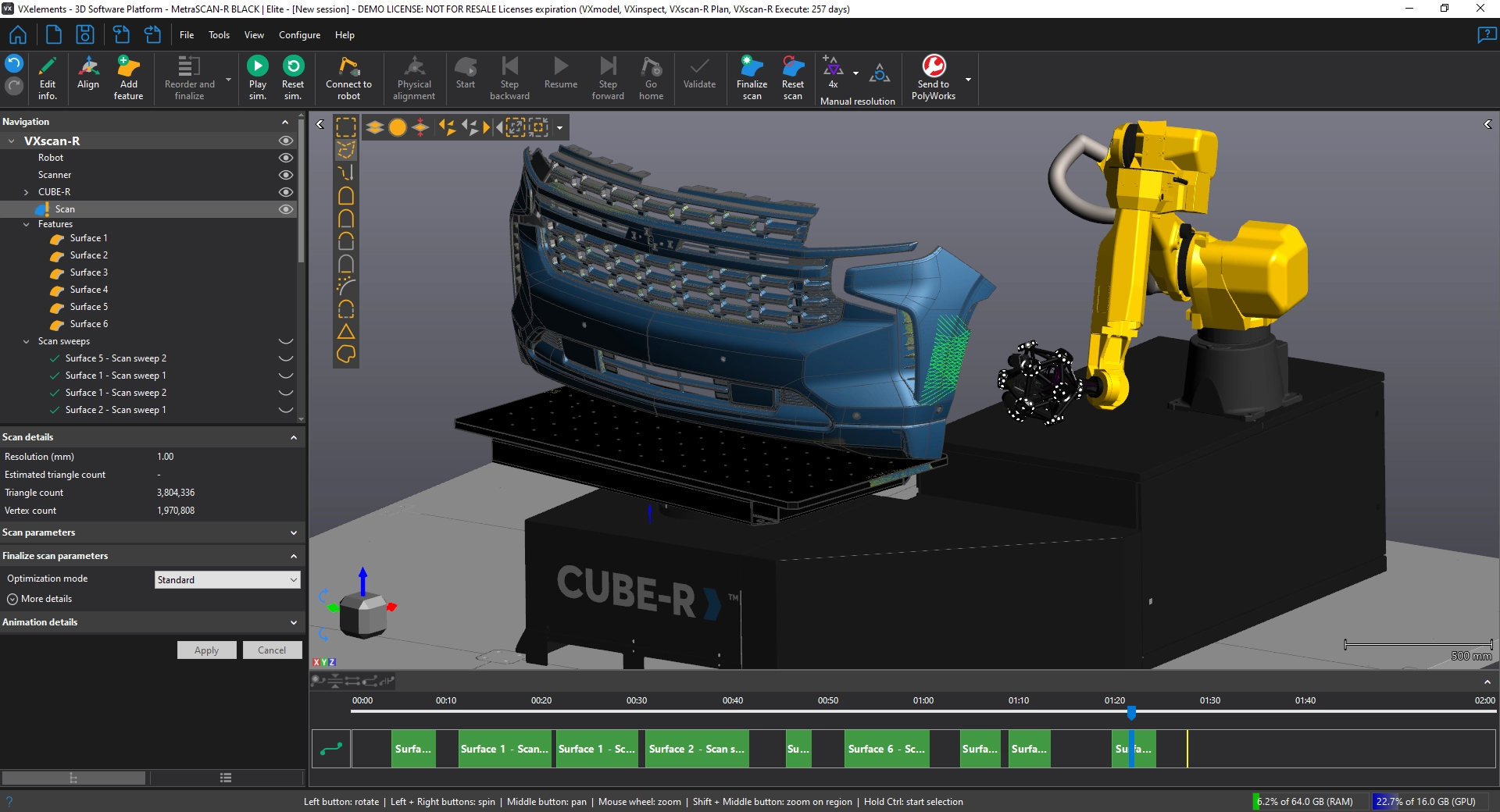
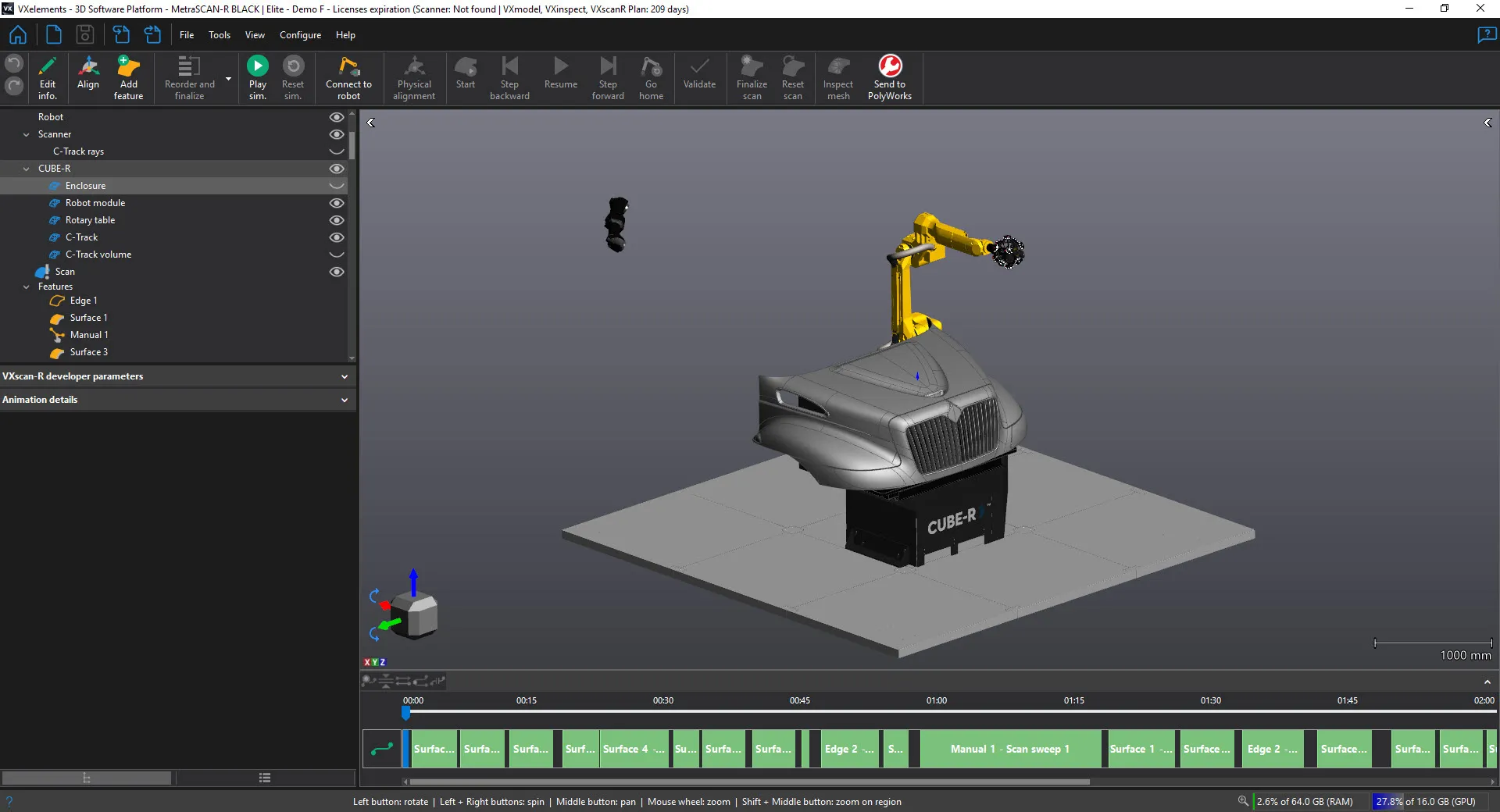
Mô phỏng + Kiểm tra
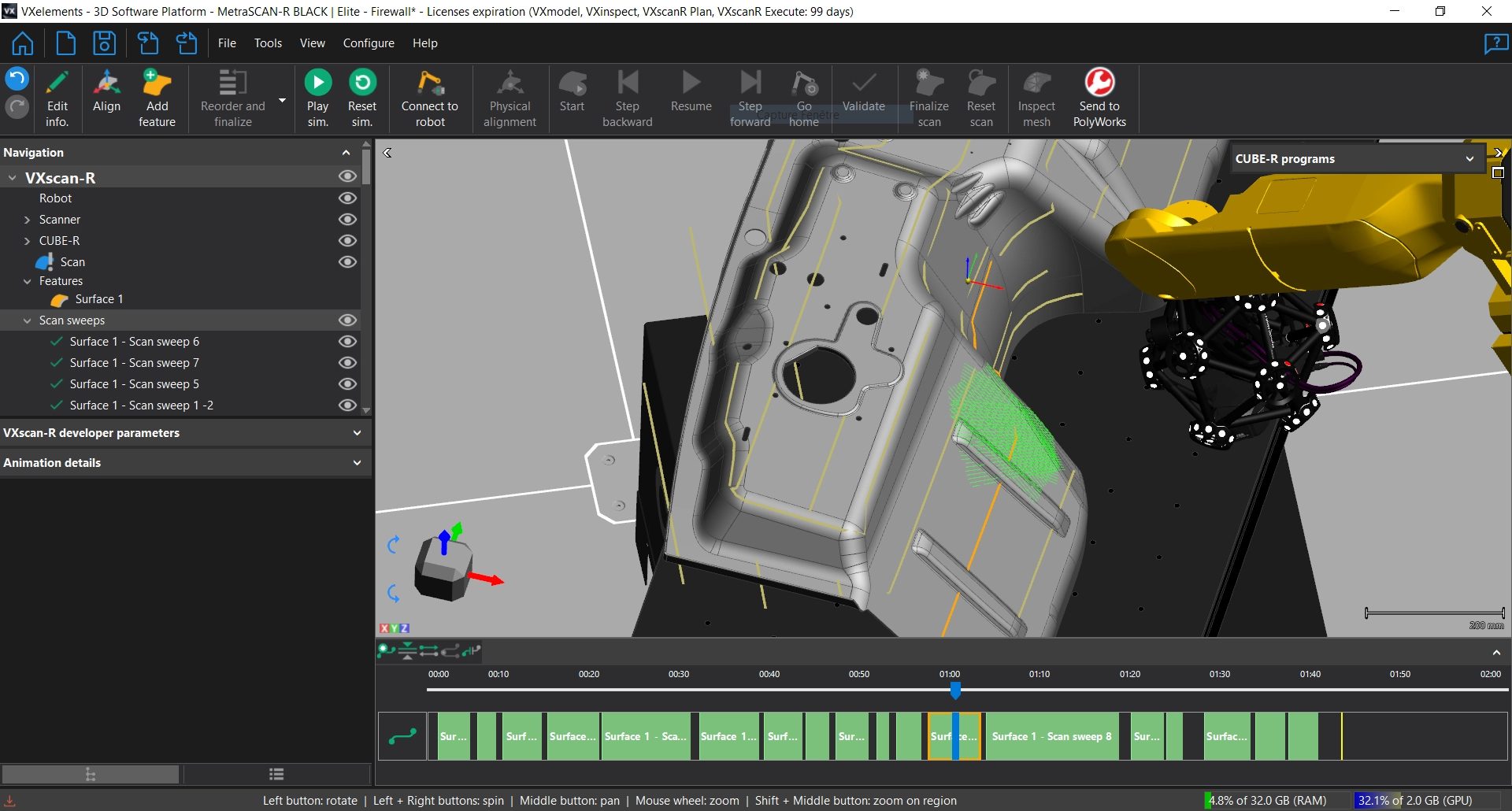
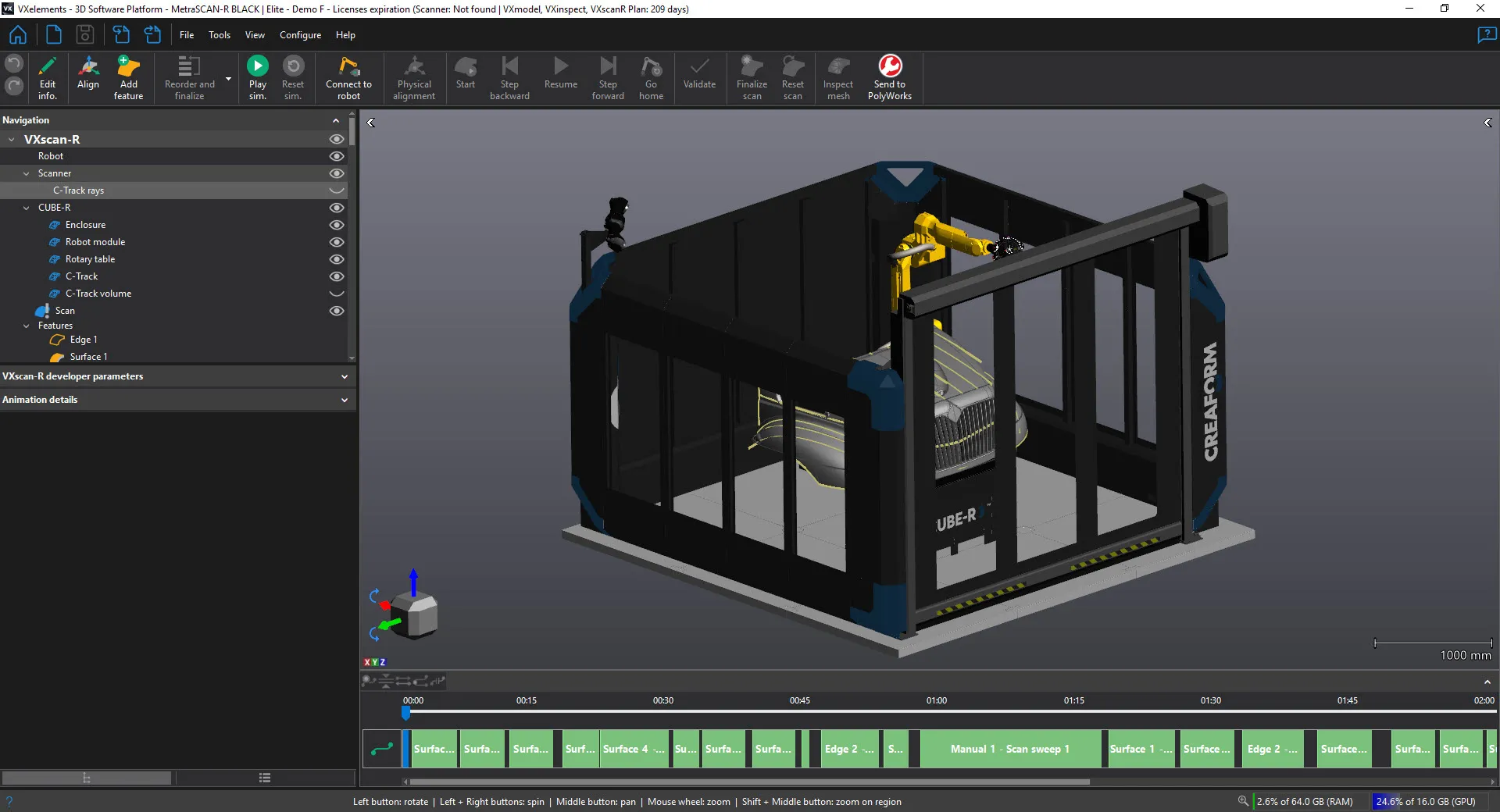
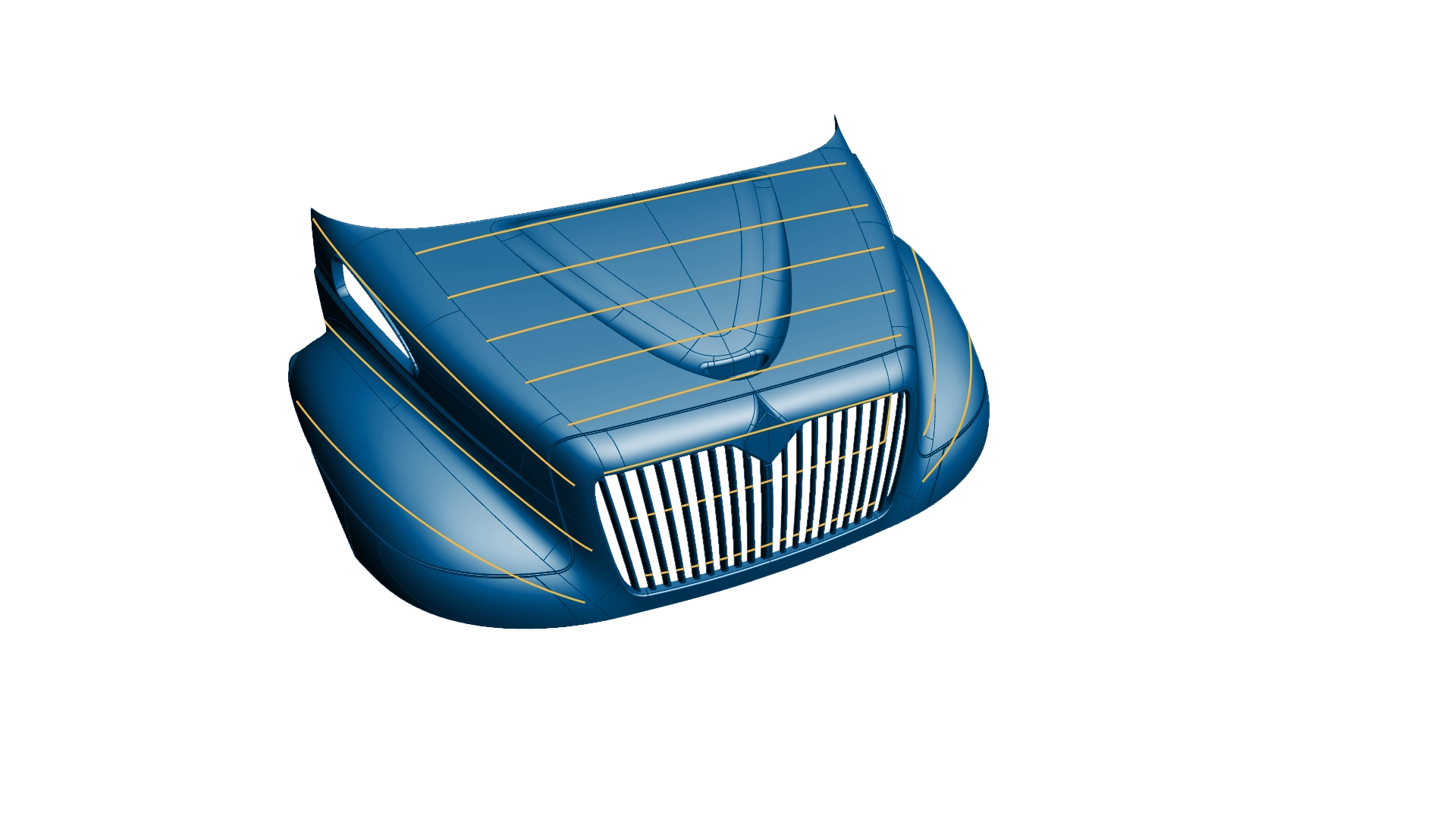
VXscan-R sử dụng mô phỏng thực tế để tạo ra các đường đi robot tối ưu, không có va chạm và điểm đặc biệt, được tối ưu hóa cho đặc tính của máy quét.
-
Mô phỏng quét
-
Kết nối với robot
-
Phát hiện và tránh va chạm
-
Chạy chương trình
Đo lường
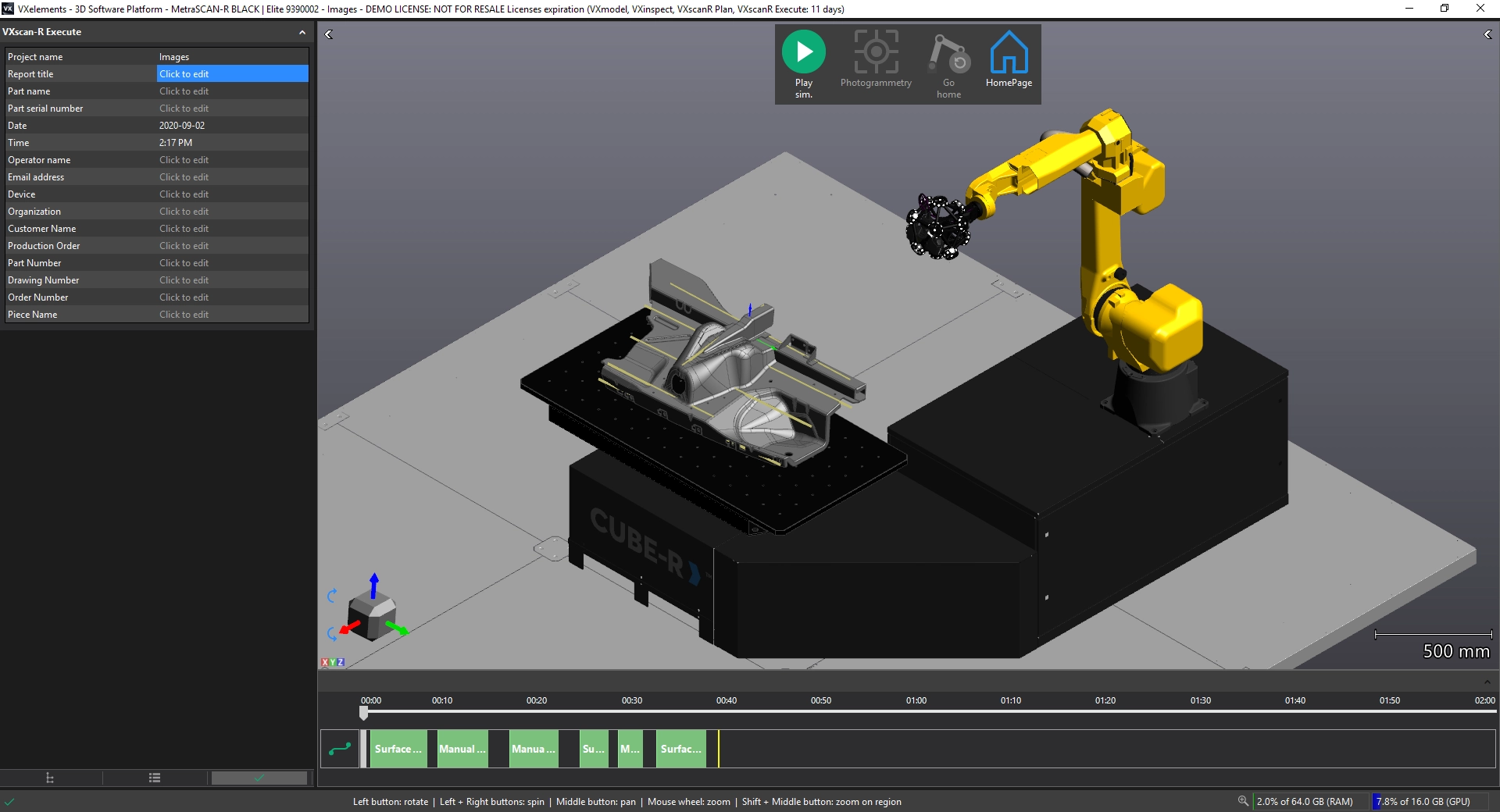
VXscan-R hướng dẫn người sử dụng trong quá trình đo đạc khi thực hiện công việc tại hiện trường.
-
Photogrammetry tự động
-
Quét 3D để tạo lưới tự động
-
Chức năng độ phân giải thông minh
-
Tạm dừng và tiếp tục chương trình
Chuyển đến phần mềm kiểm tra
VXscan-R hoàn toàn tương thích với các phần mềm kiểm tra chính, đáp ứng các tiêu chuẩn hóa.
-
VXinspect
-
Polyworks
-
Metrolog X4

 ISSOFT VINA
Now
ISSOFT VINA
Now