

.png)


Thiết bị đo quang học
LMK Position
Giới thiệu chung
Hệ thống đo lường độ sáng tự động bằng robot
LMK Robotic Interface, LMK POSITION
Hệ thống được phát triển thông qua việc kết hợp máy quay độ sáng dựa trên máy vision và chuyển động chính xác, linh hoạt của robot công nghiệp 6 trục. Nó cho phép tự động căn chỉnh và tự động hóa đo lường tích hợp để kiểm soát các mẫu đánh giá hiển thị và thực hiện tự động hóa đo lường cho màn hình cong.
-
Hệ thống LMK tự động nhận diện màn hình và điều khiển robot để thực hiện việc đo lường.
-
Nó có khả năng tự đánh giá tính phù hợp của các điều kiện đo và trích xuất giá trị dữ liệu.
-
Hệ thống cũng giúp đơn giản hóa các điều kiện đo phức tạp, cho phép chuẩn bị đo chỉ với một cú nhấp chuột.
Tư vấn với chuyên gia
Video sản phẩm
Tính năng




Ứng dụng sản phẩm
Đo lường đánh giá độ chói theo phương pháp GR, phân tích tình huống giao thông ban đêm, phân tích nguồn độ chói, xác định độ tương phản (nguồn sáng) trong các kịch bản chiếu sáng như không gian làm việc.
ĐO DƯ ẢNH MÀN HÌNH
-
Đo lường vết hình ảnh theo thời gian Burn-in có thể được thực hiện thông qua việc chụp liên tục bằng camera độ sáng.
-
Addon Sticking image điều chỉnh thời gian Burn-in của màn hình hiển thị theo nhiệt độ và thời gian của mẫu hình cờ ca-rô, cho phép thực hiện bài kiểm tra vết hình ảnh.
-
Tiêu chuẩn đánh giá màn hình hiển thị ô tô Đức (DFF) sử dụng phương pháp đo Sticking image qua LMK.
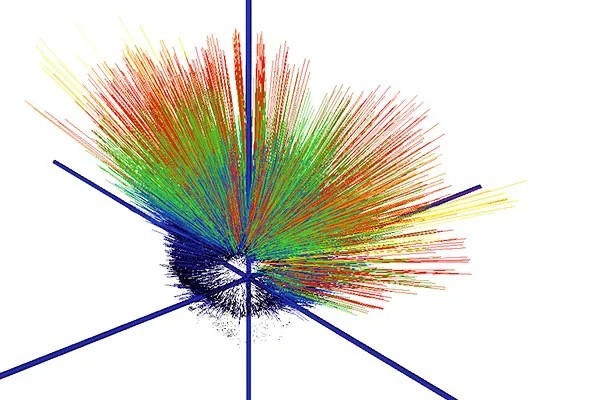
RAYDATA / ĐO MÀU SẮC
-
Máy ảnh độ sáng LMK được gắn Goniometer để chụp độ sáng và phân bố ánh sáng của nguồn sáng theo các góc khác nhau, giúp đo phân bố ánh sáng và đo lường Raydata của nguồn sáng.
-
Hình ảnh đo lường qua LMK có thể liên kết với chương trình mô phỏng OPTIS, cho phép kết nối kết quả mô phỏng và kết quả đo thực tế.
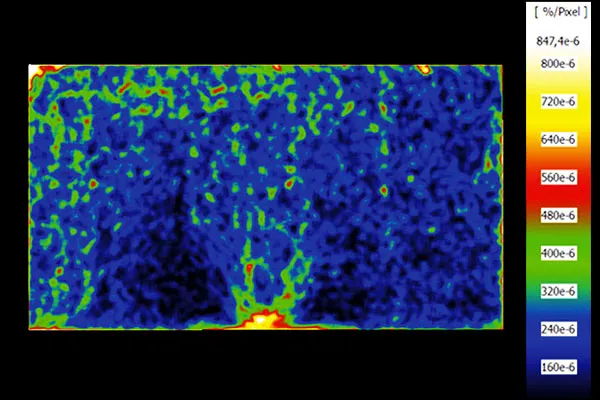
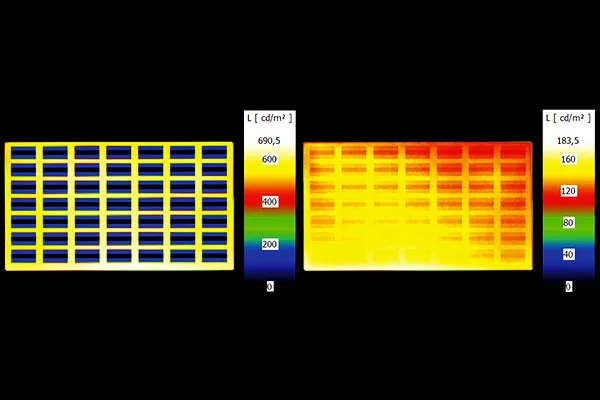
ĐO LƯỜNG BLACKMURA
-
Đo lường độ sáng của các vùng tối, như hiện tượng ánh sáng rò rỉ trên màn hình hiển thị, để nhận diện vị trí và mẫu Blackmura.
-
Tiêu chuẩn đo lường màn hình VESA truyền thống sử dụng điểm đo sáng với 9 điểm và một thiết bị đo độ sáng, nhưng gặp khó khăn trong việc tiếp cận các vấn đề về độ đồng đều như ánh sáng rò rỉ hoặc vết loang.
-
Hệ thống LMK sử dụng phương pháp đo độ sáng toàn diện (planar luminance), đo tất cả thông tin điểm ảnh trên màn hình, phân tích phân bố độ sáng không gian để đánh giá độ đồng đều của toàn bộ màn hình và Blackmura cùng lúc.
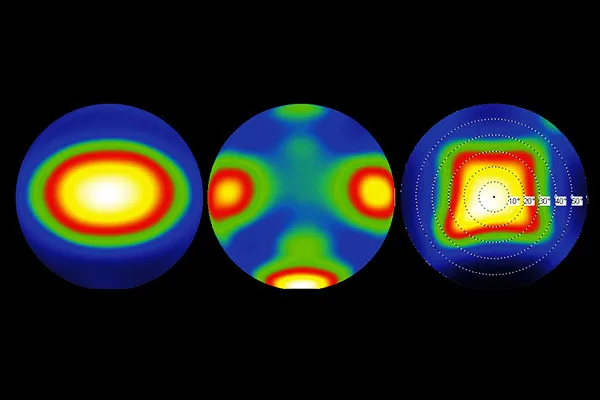
ĐO GÓC NHÌN
-
Đo lường góc nhìn là một yếu tố quan trọng trong hệ thống R&D và kiểm soát sản xuất, nơi việc đo độ sáng cục bộ và độ tương phản là những yếu tố quan tâm chủ yếu.
-
Bằng cách sử dụng các mẫu khác nhau để đo phân bố độ sáng, phương pháp đo phân bố độ sáng đã được sử dụng để phát triển thuật toán phân tách, giúp phát hiện các khu vực sáng và tối và đánh giá độ đồng đều tổng thể.
-
Qua đó, một phương pháp đo độ tương phản theo hướng nhìn của camera đã được phát triển, trong đó độ tương phản được tính bằng cách phân tách hình ảnh sáng và hình ảnh tối.
Thông số kỹ thuật
|
Dữ liệu kỹ thuật |
|
|
Tầm với tối đa của cánh tay |
875 mm |
|
Số trục |
6 trục |
|
Động cơ/Phát hiện vị trí |
Mã hóa tuyệt đối; Động cơ servo AC cho tất cả các khớp, Phanh cho tất cả các khớp |
|
Phạm vi chuyển động |
J1: ±170°; J2: +135° -100°; J3: +153° -136°; J4: ±270°; J5: ±120°; J6: ±360° |
|
Độ lặp lại vị trí (tại trung tâm của mặt gắn thiết bị cuối) |
±0.03 mm |
|
Trọng lượng LMP Position + Giá đỡ Alu Profile (Robot, Bộ điều khiển, Cáp) |
< 150 kg |
|
Kích thước ngoài của giá đỡ Alu Profile (L×W×H) |
780 mm x 780 mm x 950 mm (Chiều cao lắp robot: 970 mm) |
|
Camera tương thích |
LMK5-5, LMK6-5, LMK6-12, LMK6-30* |
|
Ống kính có sẵn |
Tất cả các ống kính lấy nét thủ công, ống kính tự động lấy nét; Ống kính kính đồng, ống kính macro, ống kính NED |
|
Môi trường lắp đặt của LMK Position |
Nhiệt độ: 0 đến 40 ℃; Độ ẩm: 20 đến 90% RH; Dao động 4.9 m/s² (0.5 G) |
|
Thiết bị tùy chọn |
Trục thứ 7 (tuyến tính) lắp dưới robot (dưới J1) |
Thư viện hình ảnh







 ISSOFT VINA
Now
ISSOFT VINA
Now